



DC-BRAKE
 Project Reference
Project Reference
TinaBrake 200 Amp for 2x1000kW motor
การเบรก หมายถึง การหน่วงให้ความเร็วรอบของมอเตอร์ให้ หมุนช้าลงอย่างรวดเร็วจะด้วยวิธีทางกลหรือไฟฟ้าอิเล็กทรอนิกส์ในบางโรงงานอุตสาหกรรม อาจจะใช้วิธีการเบรกทางกล ซึ่งมีข้อเสียคือต้องการความดูแลและบำรุงรักษา ต้องเปลี่ยนผ้าเบรกและมีผงฝุ่นจากการเบรกหากเป็นโรงงานที่เกี่ยวข้องกับอาหาร (Food & Beverage) ซึ่งมีข้อห้ามเรื่องผงฝุ่นจากการเบรกอาจจะปนเปื้อนไปกับอาหารหรือในระบบที่ยากลำบากในการติดตั้งของ ระบบเบรกทางกลเพิ่มเติมได้หรือต้นทุนในการติดตั้งทางกลสูง ส่วนข้อเสียที่เป็นของระบบไฟฟ้า เช่น เมื่อมอเตอร์หยุดหมุนแล้วจะไม่สามารถเบรกให้ Lock อยู่กับที่ได้คือไม่สามารถ holding brake ได้
 การเบรกโดยวิธีการจ่ายไฟฟ้ากระแสตรง (Dc injection braking)
การเบรกโดยวิธีการจ่ายไฟฟ้ากระแสตรง (Dc injection braking)
การเบรกด้วยวิธีนี้ทำได้ โดยการปลดไฟฟ้ากระแสสลับ 3 เฟส ออกจากขั้วของขดลวดสเตเตอร์ออกจากไลน์แล้วจ่ายไฟฟ้ากระแสตรงเข้าไปกระตุ่นขดลวดในสเตเตอร์แทน ไฟฟ้ากระแสตรงจะสร้างสนามแม่เหล็กถาวรที่ขดลวดสเตอร์ แต่ไม่ได้เป็นสนามแม่เหล็กหมุนเหมือนไฟฟ้ากระแสสลับ 3 เฟส ตัวโรเตอร์ซึ่งเป็นขดลวดวงจรปิดที่กำลังหมุนอยู่ด้วยแรงเฉื่อยจะหมุนตัดผ่านสนามแม่เหล็กถาวร จากนั้นไฟฟ้ากระแสตรงจะเกิดการเหนี่ยวนำแล้วมีกระแสไหลในขดลวดโรเตอร์จะสร้างให้เกิดแรงบิดต้านการหมุน เป็นผลให้กราฟแรงบิดของมอเตอร์เป็นกราฟแรงบิดเป็นแบบย้อนกลับหรือแบบเงา (Mirror) ใกล้เคียงกับเส้นกราฟของแรงบิดของมอเตอร์ ซึ่งความสูงของเส้นกราฟจะมากหรือน้อยนั้นขึ้นอยู่กับการจ่ายปริมาณของกระแสของไฟฟ้ากระแสตรงที่จ่ายเข้าไปเพื่อทำการเบรก มองจากค่าความต้านทานทางไฟฟ้ากระแสตรง (Resistive) จะมีค่าน้อยมากเมื่อเทียบกับค่าความต้านทานทางไฟฟ้ากระแสสลับ (Z=R+JXL) จึงจำเป็นจะต้องใช้ไฟฟ้ากระแสตรงที่มีแรงดันต่ำๆซึ่งสามารถทำได้โดยการติดตั้งหม้อแปลงลดระดับแรงดัน (Step-down Transformer) หรือจะใช้ Thyristor ที่สามารถควบคุมระดับแรงดัน หรือควบคุมกระแสที่จะจ่ายให้ มอเตอร์ขณะเบรกได้ ในกรณีที่ต้องการเบรกมอเตอร์อย่างรวดเร็ว จำเป็นต้องสร้างแรงบิดสูง เพื่อมาต้านทำนแรงเฉื่อยของมอเตอร์จงจำเป็นต้องการกระแสเบรกสูง อาจจะสูงถึง 5 เท่าของพิกัดมอเตอร์ดังนั้นเมื่อมอเตอร์หยุดหมุนแล้ว ไฟฟ้ากระแสตรงจะต้องถูกตัดออกโดยอัตโนมัติ หากปล่อยทิ้งไว้จะทำให้ มอเตอร์ร้อนและไหม้ได้ในที่สุด
 การ Start – Stop- Brake มอเตอร์
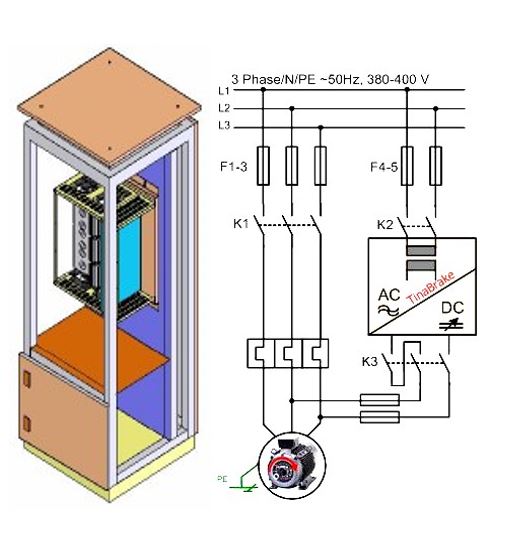
การ Start – Stop- Brake มอเตอร์กดสวิตช์ปุ่มกด Start จะทำให้คอนแทุกเตอร์ K1 ทำงานเหมือนกับการสตาร์ทมอเตอร์แบบ Direct on line โดยทั่วไป สูงที่แตกต่างเพิ่มเติมคือจะต้องมีหน้าคอนแทค NC ของ K1 มาทำหน้าที่ Inter Lock เพื่อช่วงล็อกในการ ทำงานไม่ให้ K2 - K3 ทำงานพร้อมกับ K1 ได้ เมื่อกดสวิตช์ปุ่มกด Stop ทำให้คอนแทุกเตอร์ K1 หยุดทำงาน (มอเตอร์
ได้รบไฟฟ้ากระแสตรงหลังจาก K2 และ K3ทำงาน) หน้าสัมผัส NO ของ K2 และ K3 ทำให้ตัวจับเวลา (Timer) เริ่ม ทำงาน เมื่อถึงเวลาของการจ่ายสิ้นสุดลงจะปลดการจ่ายออกโดยทำให้ K2 และ K3 หยุดทำงาน
 ผลงานที่ผ่านมา
ผลงานที่ผ่านมา
ระบบสายพานลำเลียงดินในเหมืองลิกไนต์ขนาดใหญ่ซึ่งใช้ Slip ring มอเตอร์ SIEMENS ขนาด 1000 kW จำนวน 2 ตัว ด้วยระบบแรงดันไฟฟ้า 6600 Volt 4 pole หมุนที่ความเร็วรอบ 1500 rpm ขับสายพานลำเลียงหน้า กว้าง1.2 เมตร ความยาวสายพานในแต่ละช่วงเกือบ 1 กิโลเมตร ความเร็วสาพาน 5.6 เมตรต่อวินาที (20กิโลเมตร/ ชั่วโมง) สามารถลำเลียงวัสดุได้ถึง 13,000 ต้น/ชั่วโมง (3,600 กิโลกรัม/วินาที)
ลักษณะสายพานลำเลียงบางช่วงจะเป็นทางลาดลง ทำให้เมื่อมอเตอร์หยุด โดยปกติธรรมดาจะต้องใช้เวลาในการหยุด ประมาณ 2 นาที
เบื้องต้นทาง SQ ได้ทำการติดตั้งเบรคและมอเตอร์กับเกียร์ทดรอบดังรูป
เพื่อทำหน้าที่เบรกโดยวิธีทางกล
เนื่องจากโมเมนต์ของโหลดความลาดชันไหลลงและมอเตอร์มีขนาดใหญ่มากทำให้มีพลังงานจลน์สะสมสูงจำเป็นต้องใช้พลังงานจำนวนมากในการเบรก จะเห็นว่าผ้าเบรกมีขนาดเล็กกว่าปกติ ทาง SQ ได้ออกแบบระบบเบรกให้ใช้งานรวมกับ DC brake ของ บริษัท ไทนำมิกส์ โดย Project ก่อนหน้านี้ ปี พ.ศ.2012 ที่ได้ติดตั้งให้ทา SQ DC brake ทำงานได้อย่างมีประสิทธิภาพ ทำให้การออกแบบระบบเบรกเล็กลงกว่าเดิม
การทดสอบเบรกโดยใช้วิธีทางกลจำนาวเบรกทั้งหมด 4 ชุด
การหยุดสายพานที่ไม่มีโหลด จะใช้เวลาในการหยุด 12 วินาที การหยุดสายพานที่มีโหลด 35 วินาที - 2นาที 25วินาที ขึ้นอยู่กับโหลด ผ้าเบรกและการตั้งเบรก การตั้งเบรกมากไปจะทำใก้ผ้าเบรกหมดเร็วด้วยการหยุดมอเตอร์ 3-4 ครั้งเท่านั้น แต่ถ้าตั้งเบรกน้อยไปจะทำให้เบรกไม่อยู่ ทำให้ดินบนสายพานลำเลียงยัง ไหลไปกองจำนวนมาก เป็นปัญหาในเชิงการผลิต เพราะต้องเสียให้การเครียเดินที่ไปกอง
 การทดสอบเบรกโดยใช้วิธีทางกลรวมกับ DC Brake
การทดสอบเบรกโดยใช้วิธีทางกลรวมกับ DC Brake
การหยุดสายพานที่ไม่มีโหลด จะใช้เวลาในการหยุด 7 วินาที การหยุดสายพานที่มีโหลด 10 - 15 วินาที
การตั้งค่าของตัง DC Brake ให้ทำการจ่ายกระแส 50 ให้มอเตอร์ 1000 kW x 2 กระแสที่จ่ายให้มอเตอร์ ประมาณตัวละ 25 A หลังจากหยุดมอเตอร์ 3 วินาที (เพื่อให้สนามแม่เหล็กไฟฟ้า AC ยุบตัว ) แล้วทำการจ่าย 50 A เป็นเวลา 20 วินาที
ขนาดกระแสที่สามาปรับตั้งได้ 0-200 แอมป์
ผลของการใช้งานสามารถหยุดมอเตอร์ได้อย่างนิ่มนวลภายในระยะเวลาเพียง 10-15 วินาที การเบรกประเภทนี้จะไม่จำเป็นต้องเปลี่ยนผ้าเบรกบ่อยเหมือนก่อน ทำให้ลดค่าสูญเสียได้มากและไม่จำเป็นต้องโกยดินที่ไปกองการหยุดสายพานแต่ละครั้งสามารถ START ขึ้นไปใหม่ได้ทั้นทีทำให้ประสิทธิภาพในการผลิตมากขึ้น ผลการใช้งานเป็นที่หน้าพอใจอย่างมากต่อฝ่ายช่างซ่อมบำรุงและจากผู้ใช้งาน
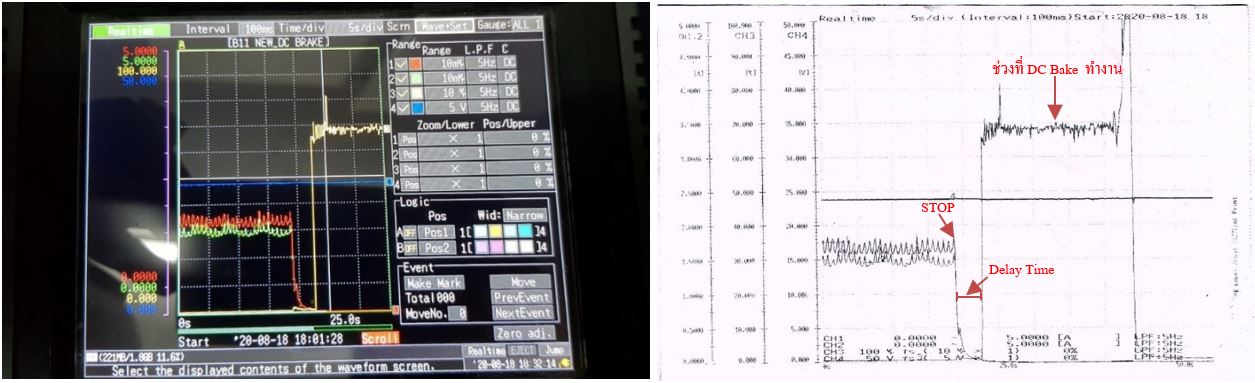
รูปที่ 4 กราฟแสดงการทำงานของมอเตอร์และ DC Brake


 line ID :
line ID :