www.thainovation.com
ENG
HOME
ผลิตภัณฑ์
ห้องสนทนา
Download
ติดต่อ/ขอข้อมูล
หน้าหลัก
ผลิตภัณฑ์
Hydraulic Crimping Tools
ชุดป้องกัน DOCR
ชุดป้องกันมอเตอร์ EOCR
สิ้นค้ารอขาย
MOTOR VIBRATOR
EOCR Electronic over current relay
แท่นหมุน แสดงสินค้า
แท่นหมุน Motor show
โต๊ะหมุนแสดงสินค้า
ห้องภาพงานแสดงสินค้า
ผลงานที่ผ่านมา
ถาม-ตอบ ปัญหา
ราคาสินค้า
Automation System
DCS & SCADA
HMI
PLC
IoT
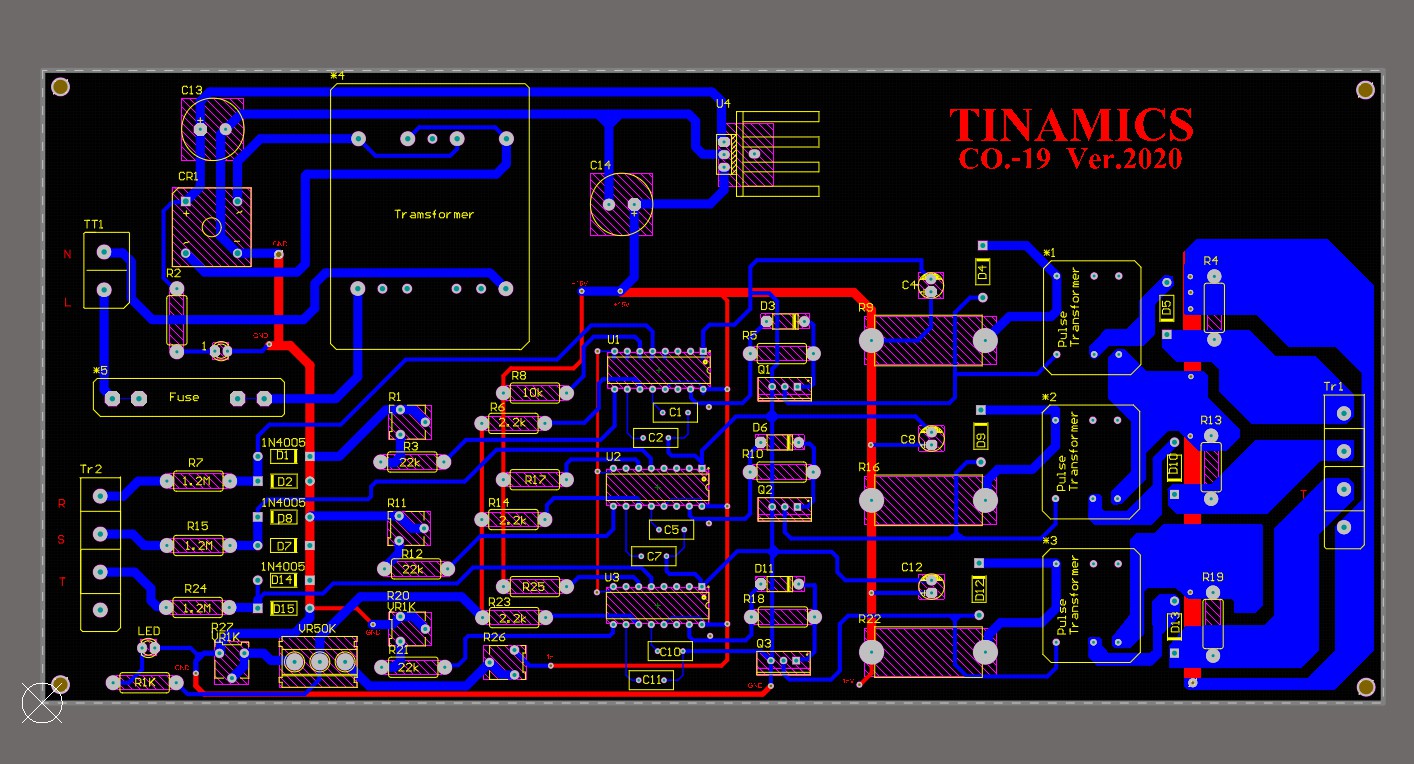
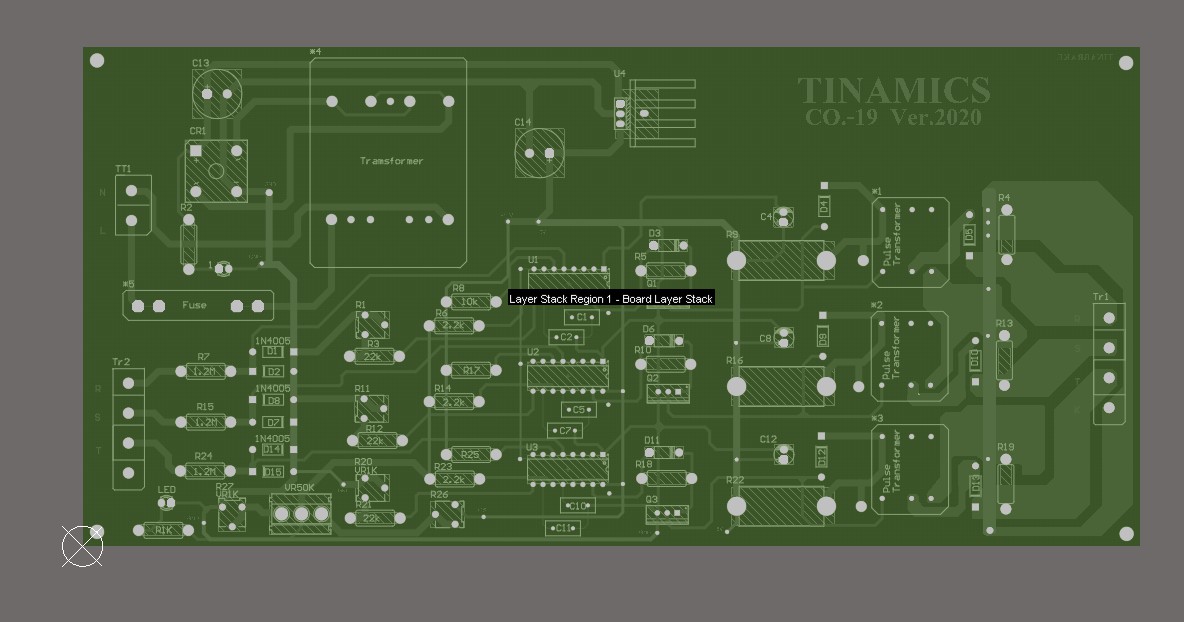
Microcontroller PCB
DC Brake
ถาม-ตอบ (FAQ)
ถาม-ตอบ แท่นหมุน
ห้องสนทนา
ติดต่อ/ขอข้อมูลเพิ่ม
User name:
Password :
×
Line Chat
Line
line ID :
@ecomsiam
Scan QR code หรือกด Add friend ได้ที่
https://line.me/R/ti/p/%40yel6714y
counters